|
|||
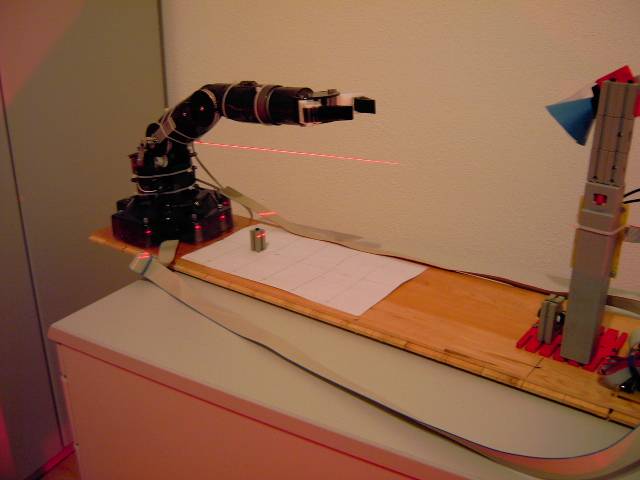
Der Roboterarm ist in Ruheposition und erlaubt der Kamera freie Sicht auf das Objekt. Der Laserstrich ist sichtbar auf dem Objekt.
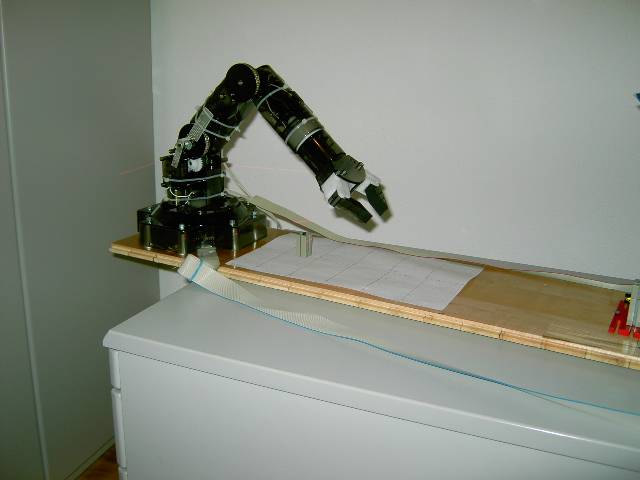
Das Objekt ist erfasst, die Winkel der Gelenke berechnet. Zuerst werden die Gelenke gefahren, die nach oben laufen müssen. Hintergrund:
Schultergelenk ist auf Zielstellung
Ellbogengelenk fährt runter
Auch Ellbogen hat Zielstellung erreicht
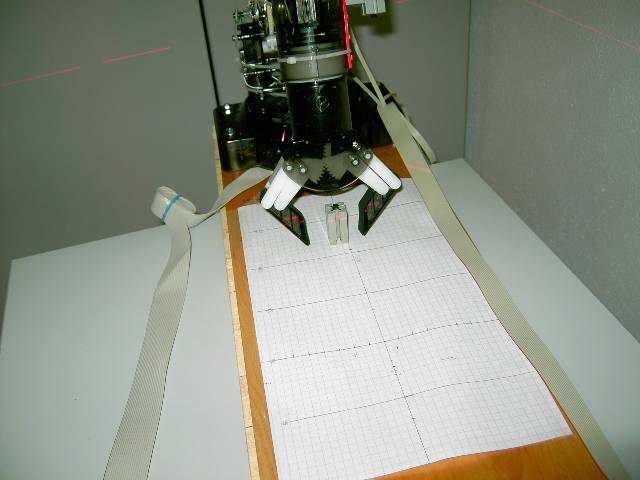
Voila, die Zange umfasst das Objekt
Zugegriffen
Objekt weggehoben
Hier die C-Control II. Links daneben die Platine mit den Motortreibern. Die Treiber selbst sind unten bestückt, deshalb sieht die Platine etwas leer aus.
Die Platine zur Auswertung des Kamerasignals.
|